Computers (in senses of machines and automatons) were originally created as the attempt to imitate human thinking processes. As a researcher in computer science, I have developed an affection toward understanding of how humans perform thinking in conceptual realm. If there is such a thing that could potentially be my current research direction, trying to understand the intuition behind human thinking model must be it.
Artificial creator
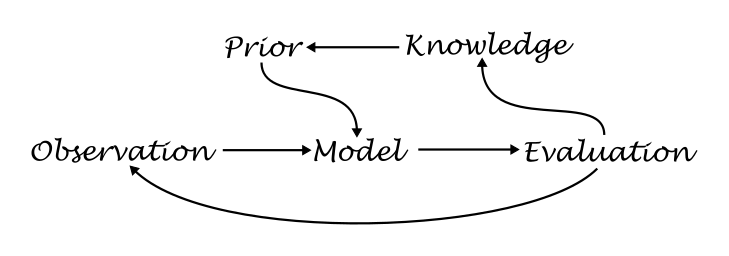
Thinking model
Simply knowing how to train neural networks does not acquaint someone with the insight into the brain. It simply creates another kind of apparatuses that is comparatively hard to understand. So I spent years to look for a more worthwhile means to understand the cognitive process of thinking. And finally after years of research, it has come to light that thinking could be modeled and creativity could be elaborated. The important of this research, is not for what I have done, but for what my model could be used.
| (Yet) Another Theoretical Model of Thinking. Patrick Virie | |
| Virie, P. (2015). (Yet) Another Theoretical Model of Thinking. arXiv preprint arXiv:1511.02455. |
Deep learning
I am very fascinated by the latest achivement of deep learning. I have spent year to dedicate my effort doing research on this topic. Please check my online note for a summary of my venture in the field and also my blog for more discussion.
Spatial conformation
"Since I am not smart enough to always write a correct program for a robot, so I make a robot follows my erroneous program in a meaningful way instead." When humans try to explain some concepts to others, the recipients may somehow be able to understand them even if the explanations are highly abstract and missing full details. I would like to apply the same idea into robotics where we are not trying to give perfect plans to machines; instead, we are going to show only the abstract, inaccurate, and incomplete versions of the plans and let the machines deduce the relations to the real scenarios by themselves. With basic intuition, the problem can be regarded as the localization problem of the current state into the abstract plans through spatial matching. I have been developing algorithms that can be used to find relation between patterns in situations and plans. Details can be found in my thesis.
| Conformative Filter: A Probabilistic Framework for Localization in Reduced Spaces. Chatavut Viriyasuthee and Gregory Dudek | |
| In Proceedings of the 8th Canadian Conference on Computer and Robot Vision (CRV '11), pp. 24-31. St. John's, Newfoundland, Canada. May 2011. | |
| One-to-one Feature Matching with Inaccurate Maps. Chatavut Viriyasuthee and Gregory Dudek | |
| In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics (ROBIO 2011), Phuket, Thailand, December 2011. |
Terrain Coverage
I had been participated in the terrain coverage research with Professor Ioannis Rekleitis and Mr. Anqi Xu in the Mobile Robotics lab at McGill. The goal of this research is to develop an optimal strategy for controling an agent(s) to perform area coverage in a given bounded region. I find myself interested in this research because any coverage algorithm can be applied to reinforcement learning as a policy for initial exploration.
| Optimal Complete Terrain Coverage using an Unmanned Aerial Vehicle. Anqi Xu and Chatavut Viriyasuthee and Ioannis Rekleitis. | PDF Video |
| In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA '11), pp. 2513--2519. Shanghai, China. May, 2011. |